Hookbot elebia
En el sector offshore, en plataformas marítimas como las de petróleo y gas, la carga y descarga de contenedores de los buques de servicio es un procedimiento arriesgado para los operadores y las mercancías. El Hookbot ha sido diseñado con el objetivo de mejorar la seguridad en el manejo y traslado de estos contenedores en plataformas marítimas y en condiciones extremas.

Situación actual en las operaciones en alta mar
El robot a control remoto Hookbot para plataformas en alta mar ha sido diseñado con el objetivo de mejorar la seguridad, minimizar los riesgos y aumentar la productividad en la manipulación y movimiento de contenedores en plataformas marítimas y en condiciones extremas.
Actualmente, la manipulación y el movimiento de esta carga conlleva riesgos intrínsecos para los operarios que intervienen al enganchar y desenganchar las cadenas de elevación de los contenedores. Específicamente, en plataformas petrolíferas durante la carga y descarga de contenedores desde un buque de suministro.
El movimiento del buque, junto con la capacidad de manejo del operador de la grúa, generan inestabilidad e inseguridad debido al movimiento relativo entre plataforma y buque en el posicionamiento de los contenedores.
Esto a menudo provoca impactos con otros contenedores o estructuras metálicas del buque de carga.
Cerca de 1/3 de los incidentes en plataformas en alta mar están relacionados con el proceso de elevación.
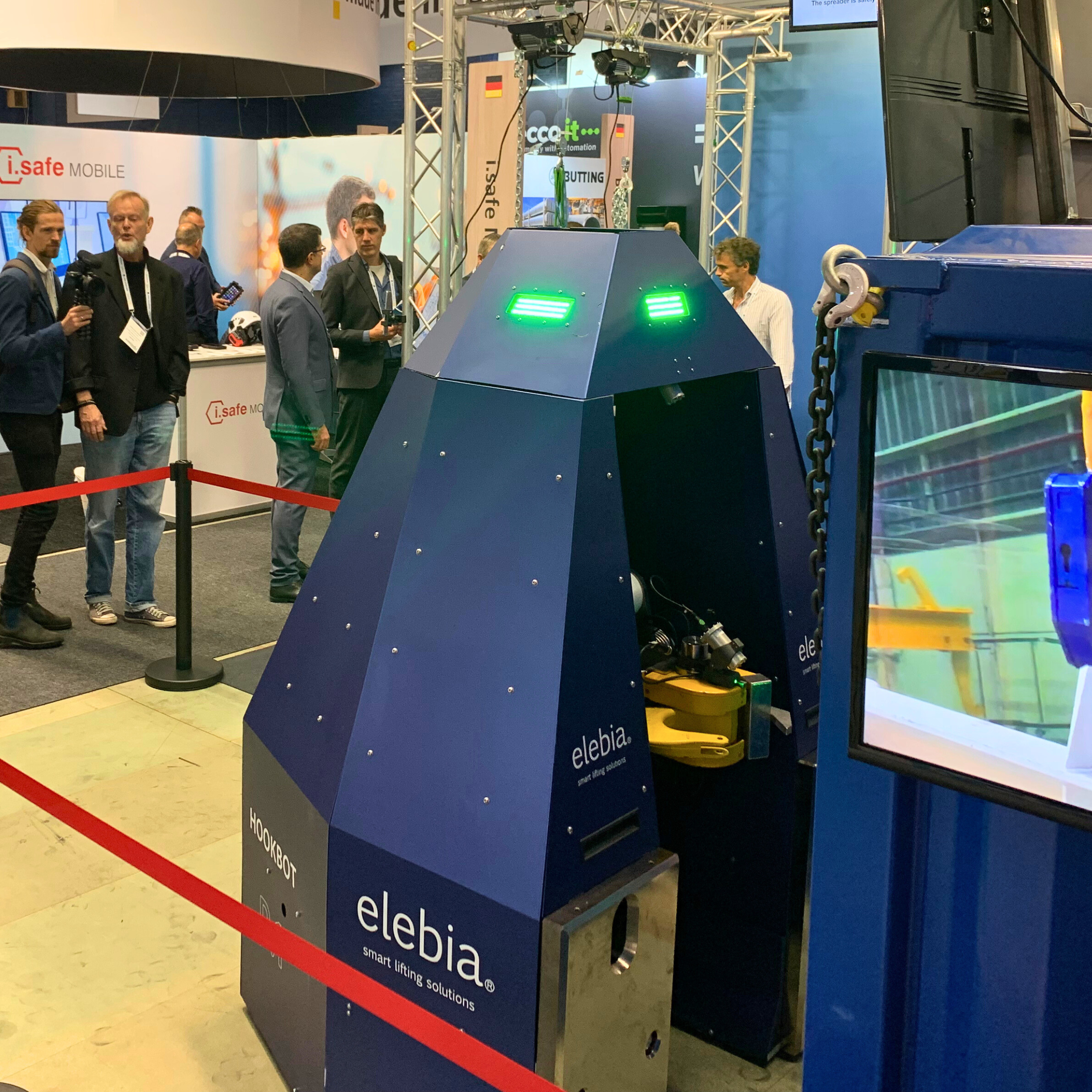
Explora las características del Hookbot para plataformas en alta mar
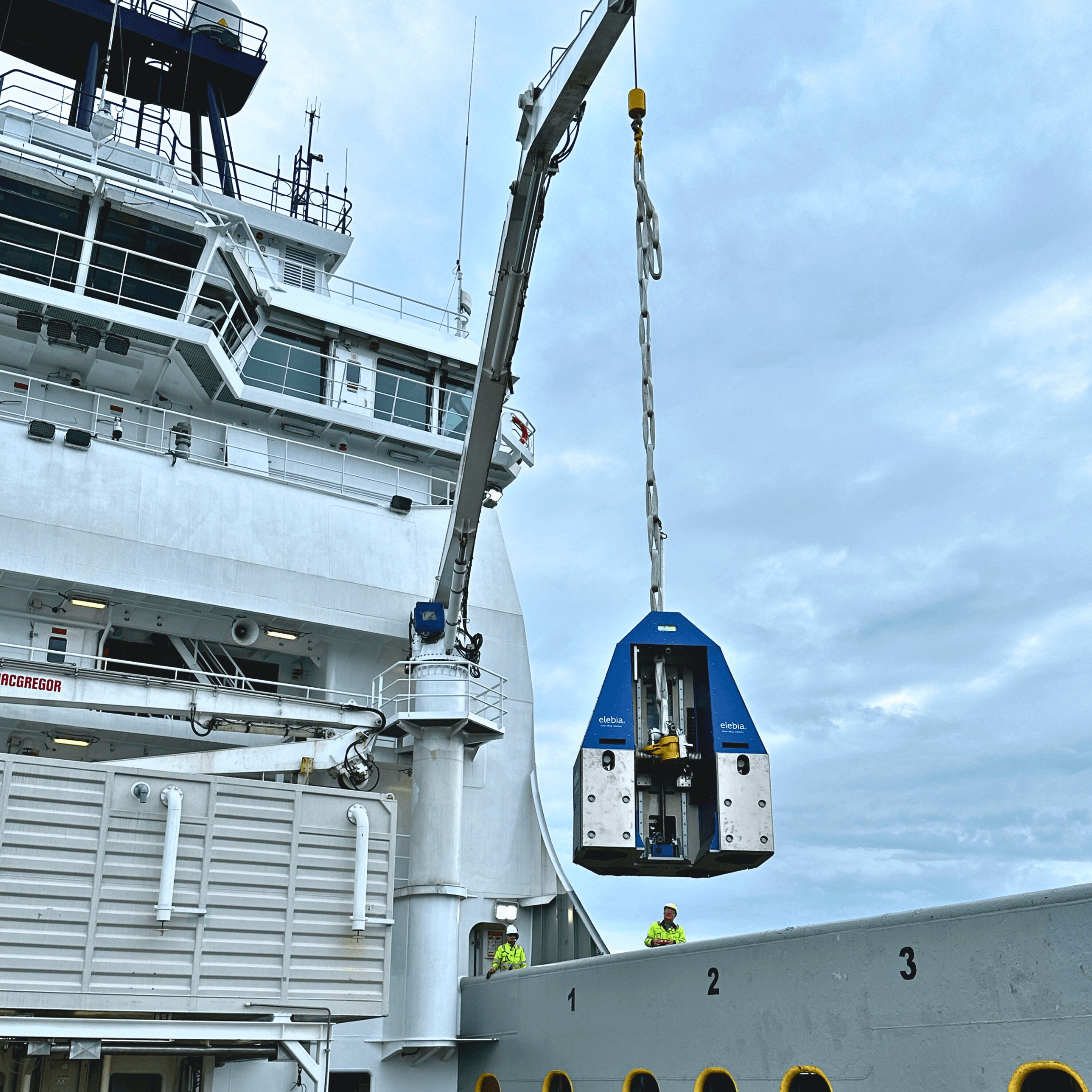
Vea el primer prototipo del Hookbot en acción
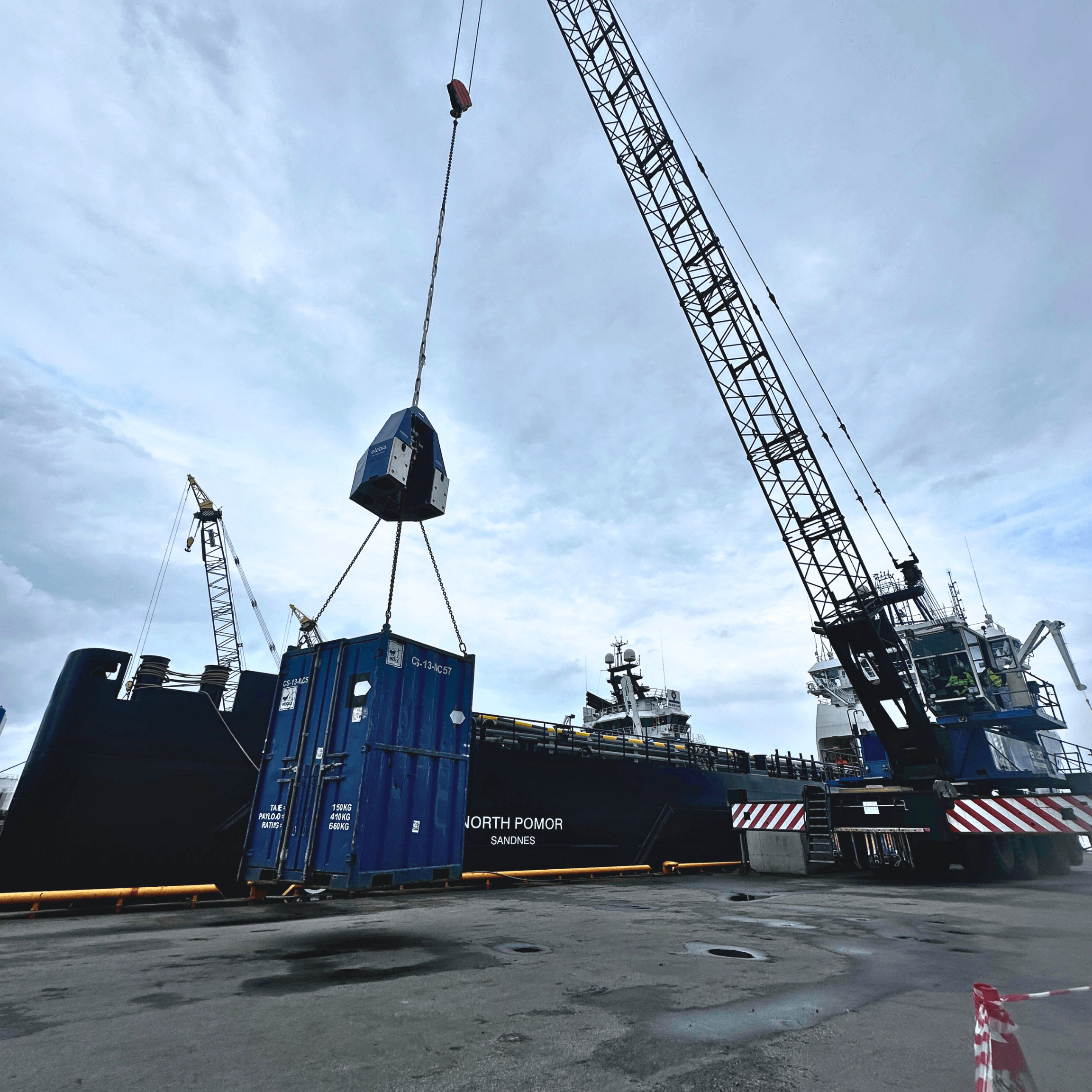
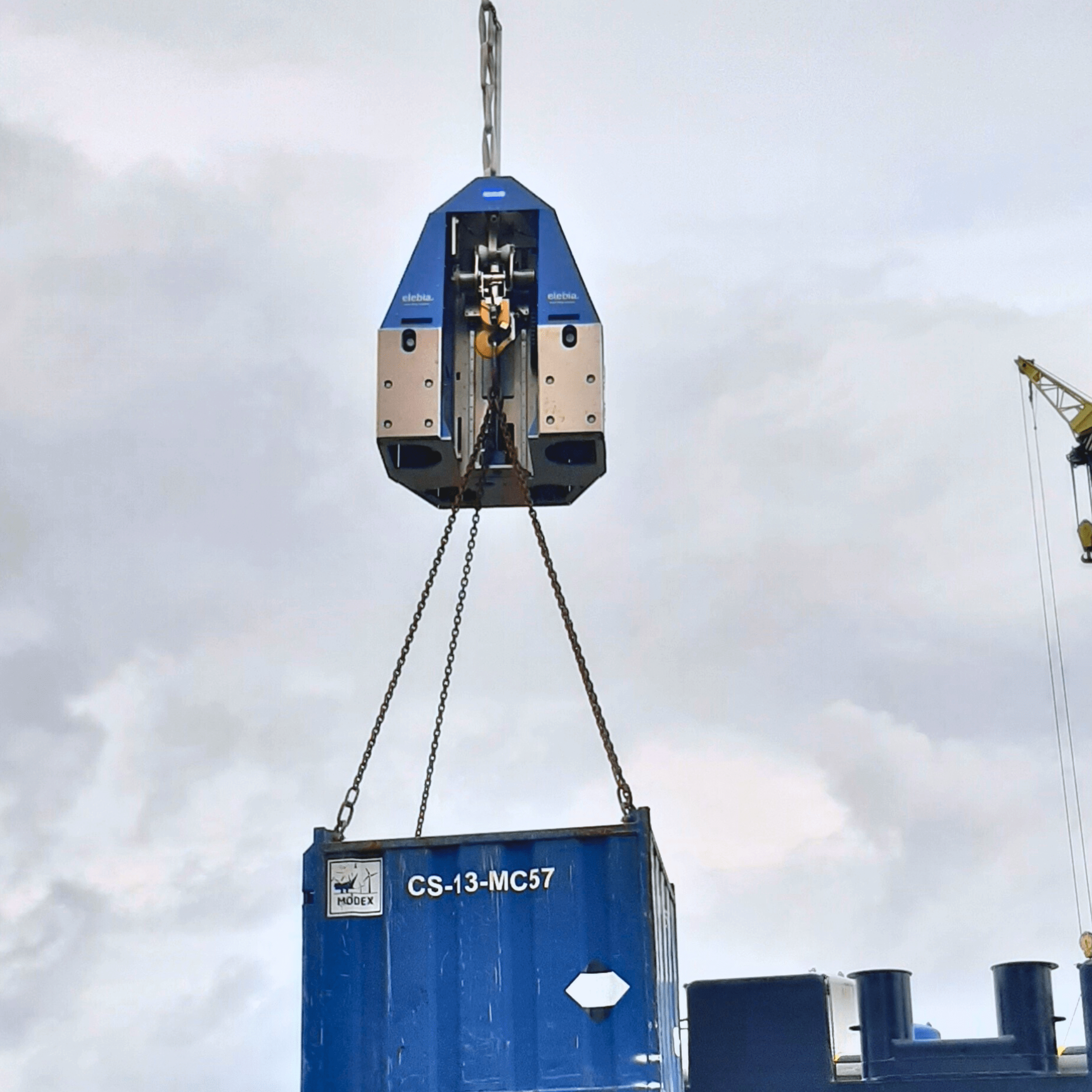
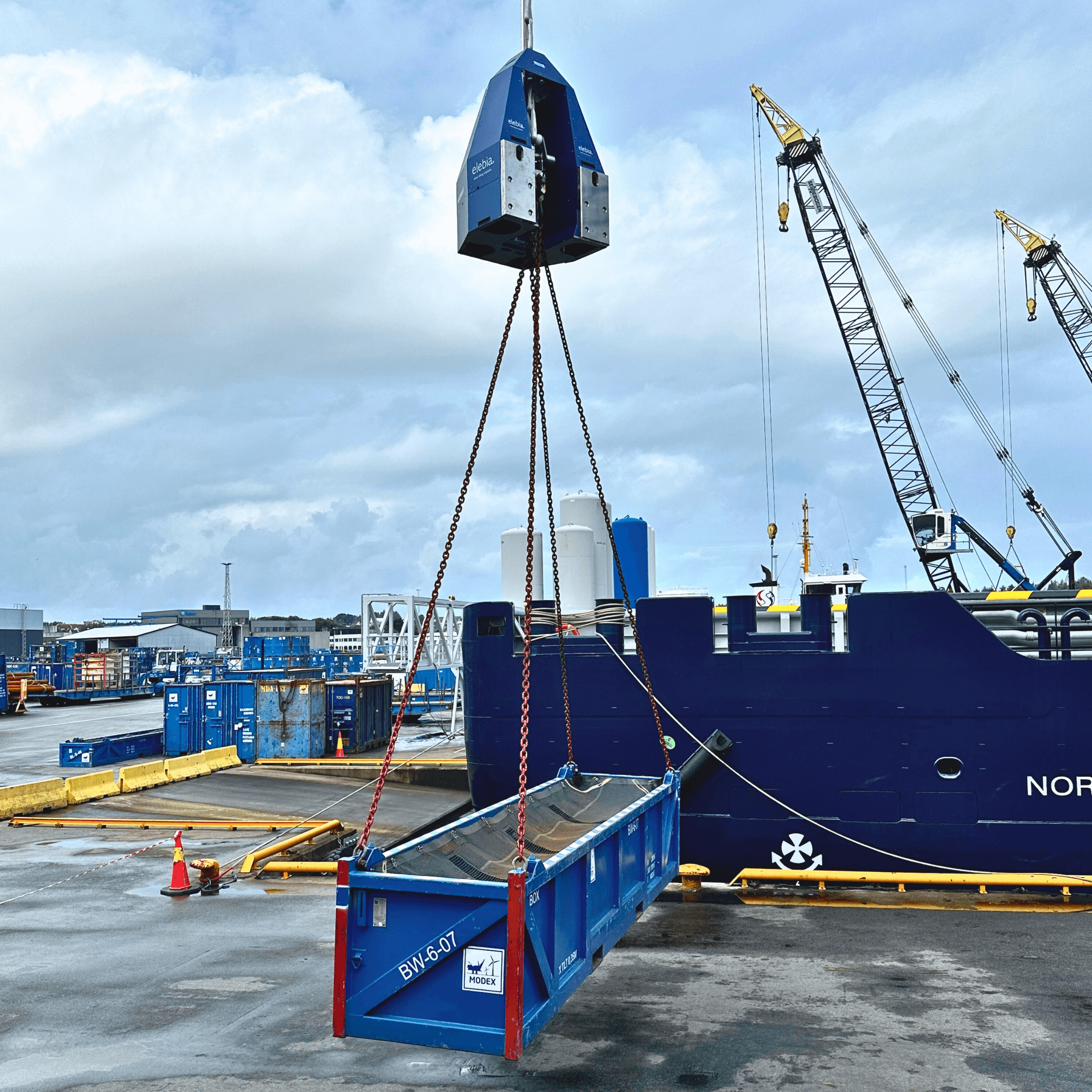
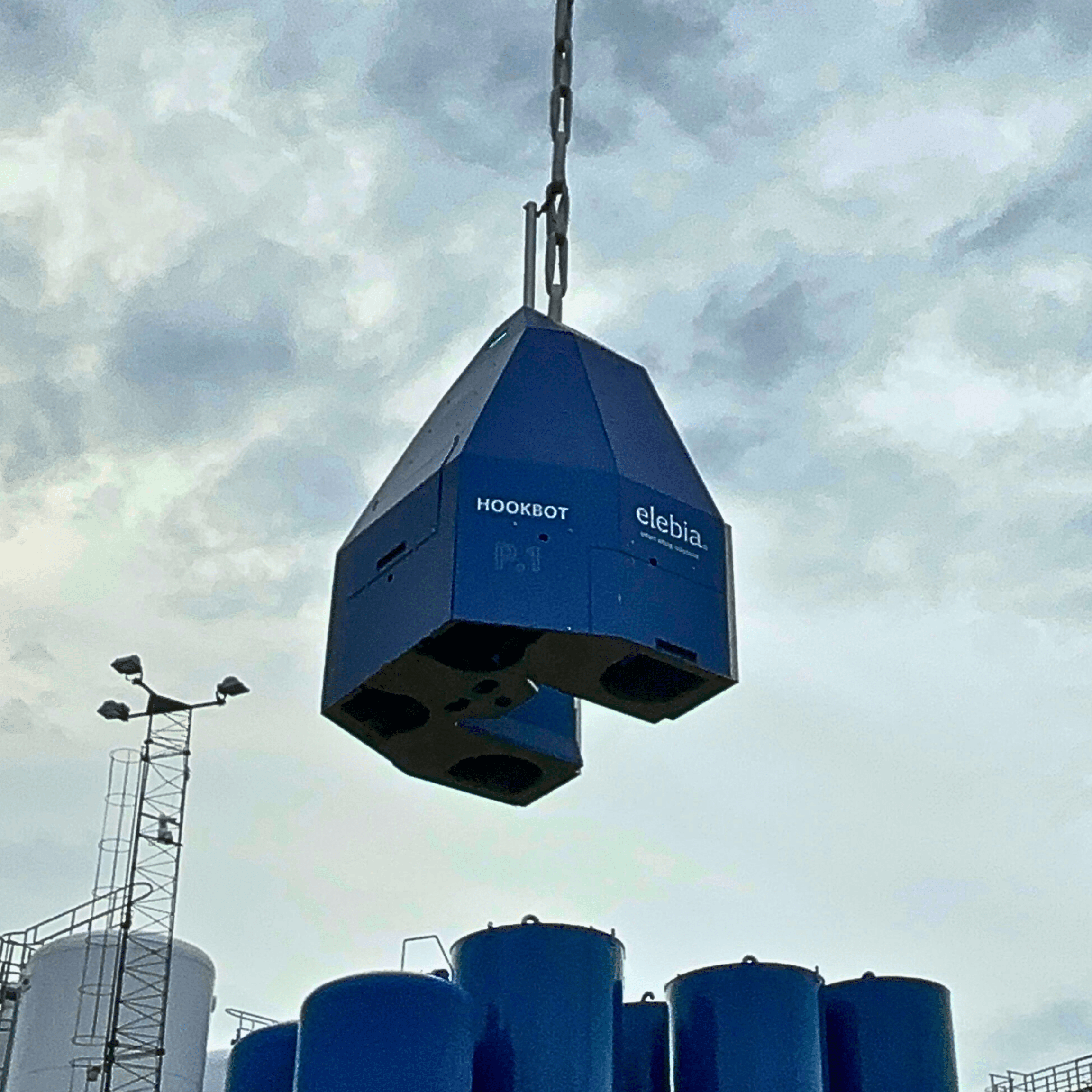
Contenedores en alta mar con un único punto de elevación utilizando Hookbot
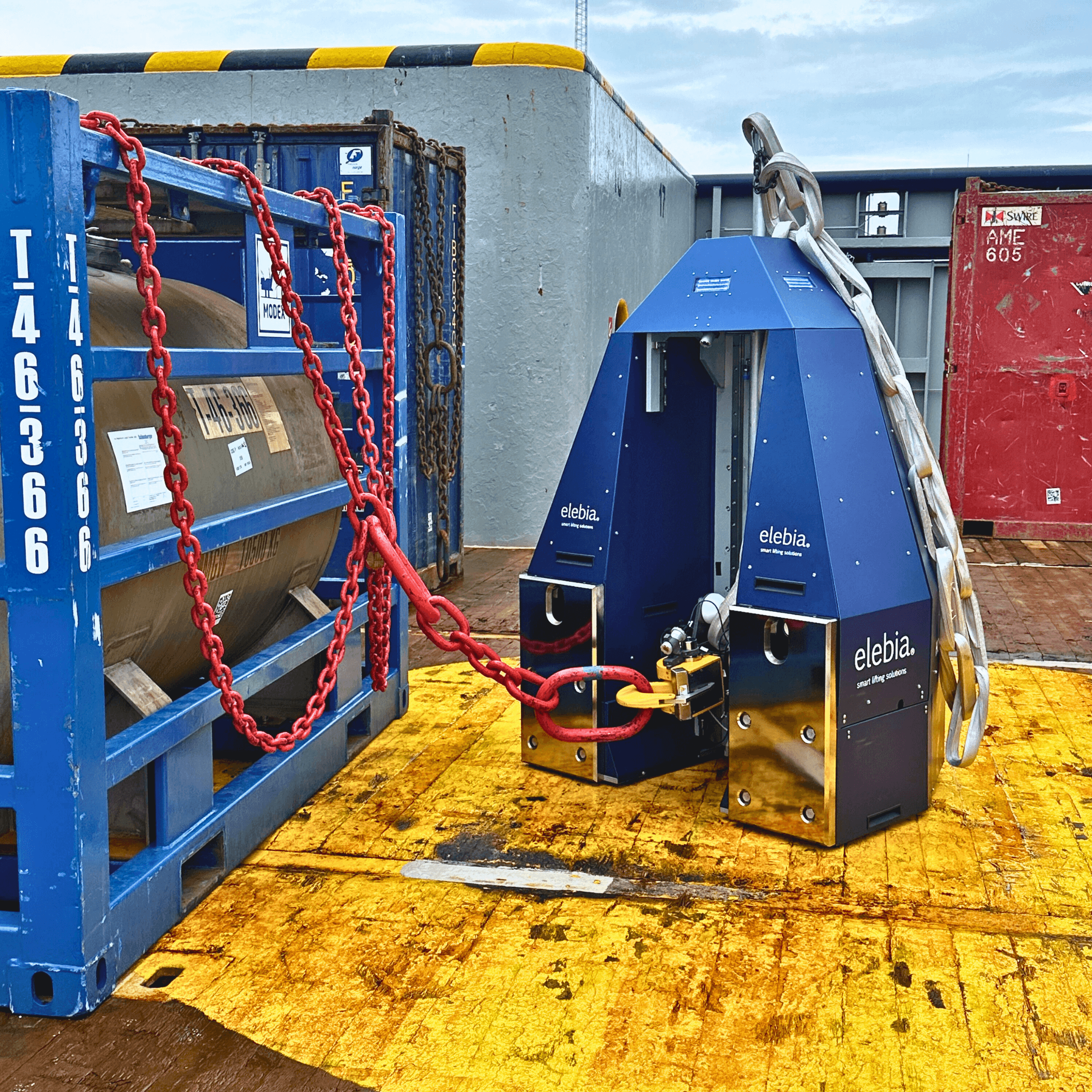
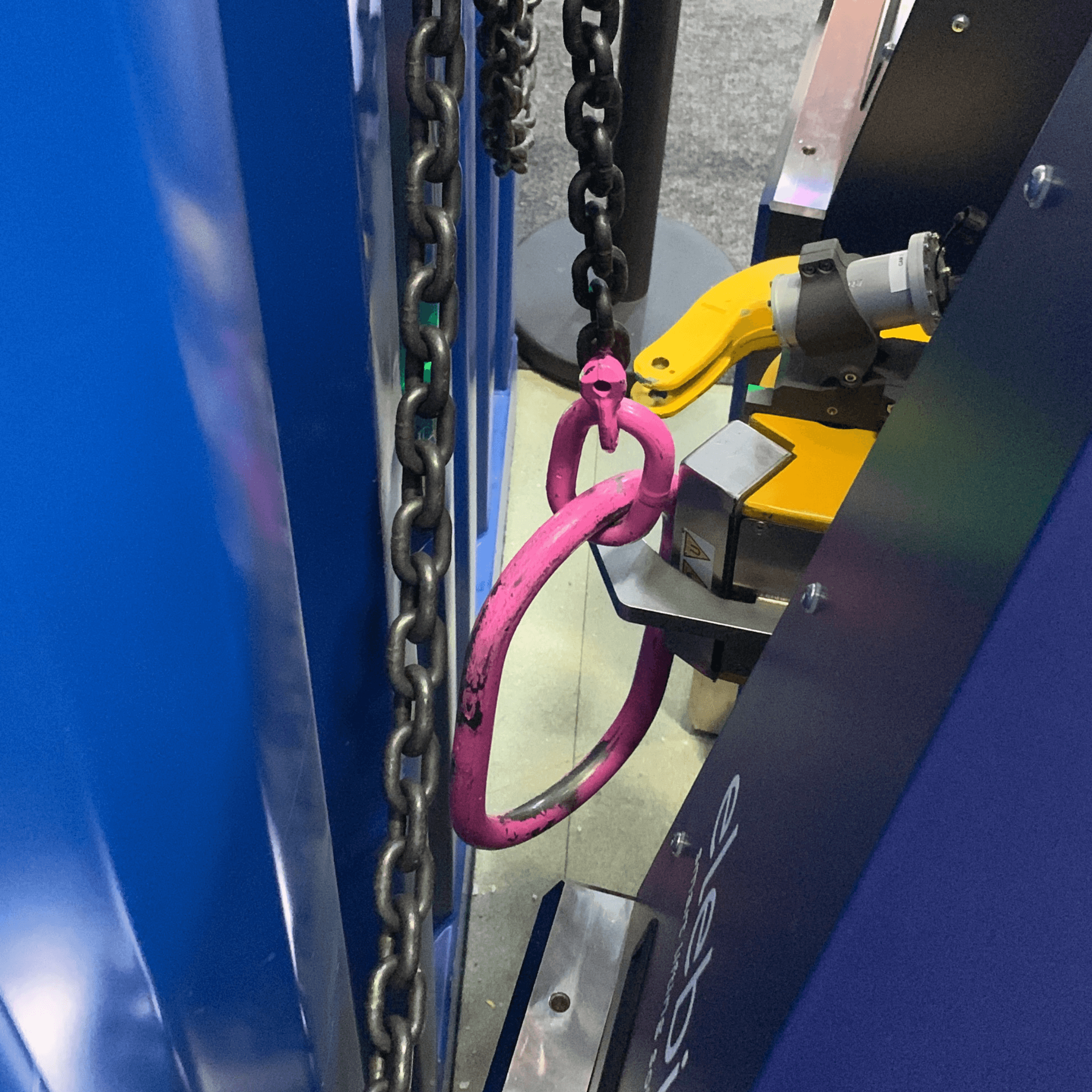
Contenedor abierto con dos Masterlinks e integración de Hookbot
Elevación eficiente con eslingas textiles y Hookbot
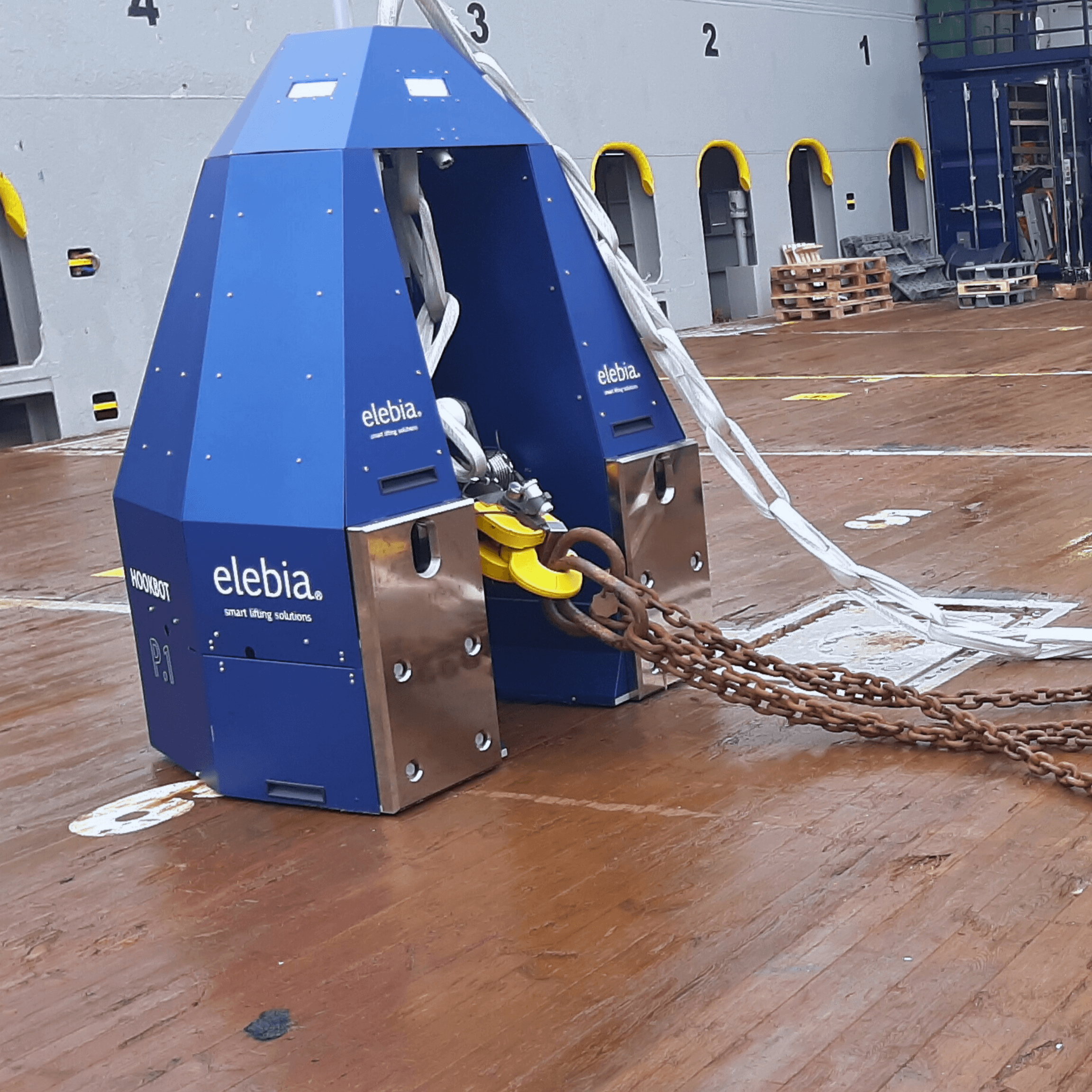
Hookbot p.1
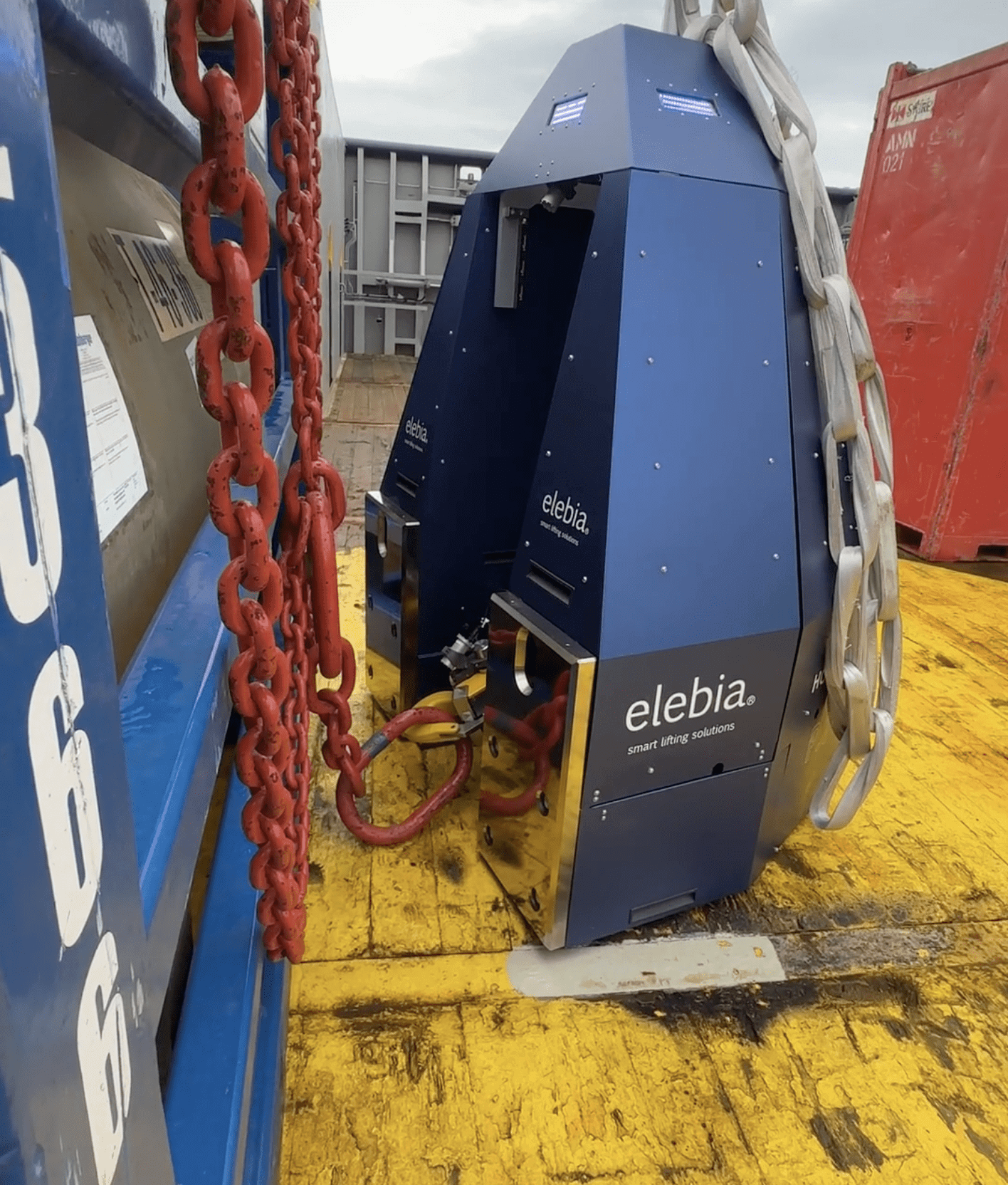
- Es más grande, más robusto y ya se ha sometido a pruebas en un entorno operativo en el puerto de Stavanger.
- Diseñado para su uso en plataformas en alta mar, el Hookpot P.1 es un robot autónomo de última generación que se mueve con suavidad sobre diferentes superficies, incluso en presencia de obstáculos.
- El producto se controla de forma totalmente remota, lo que reduce la intervención humana a cero y allana el camino hacia el objetivo final de crear una plataforma no tripulada para la logística en alta mar.
1

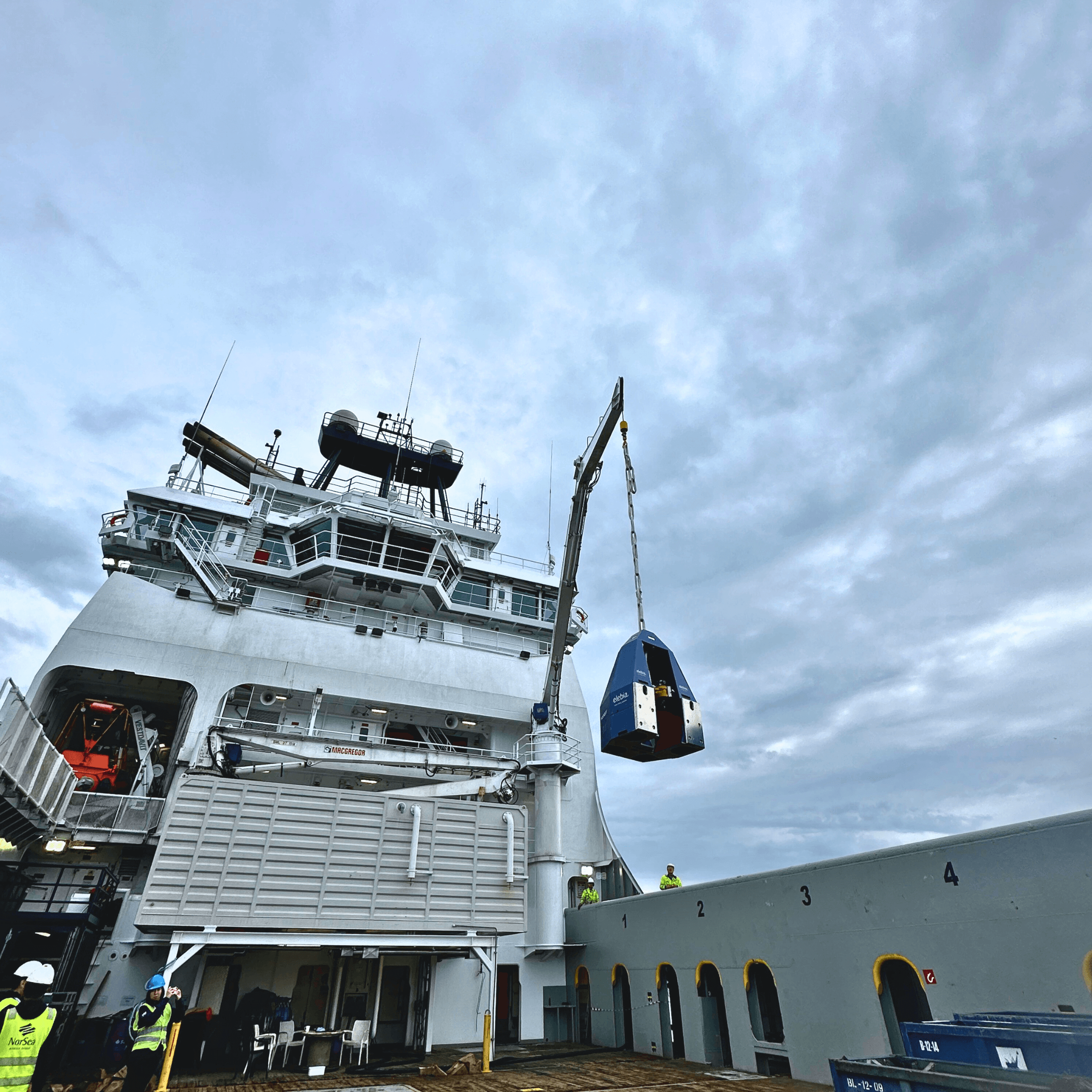


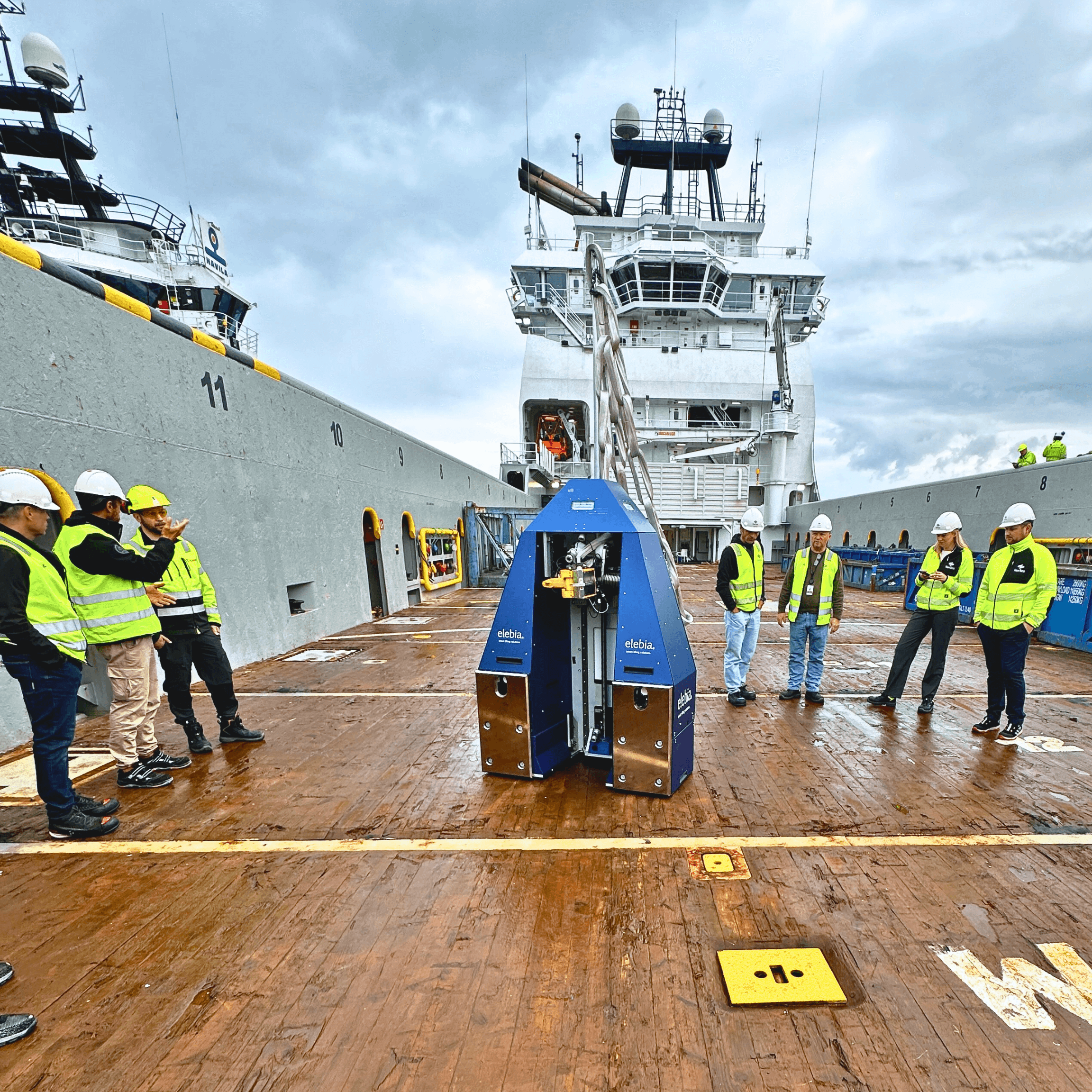
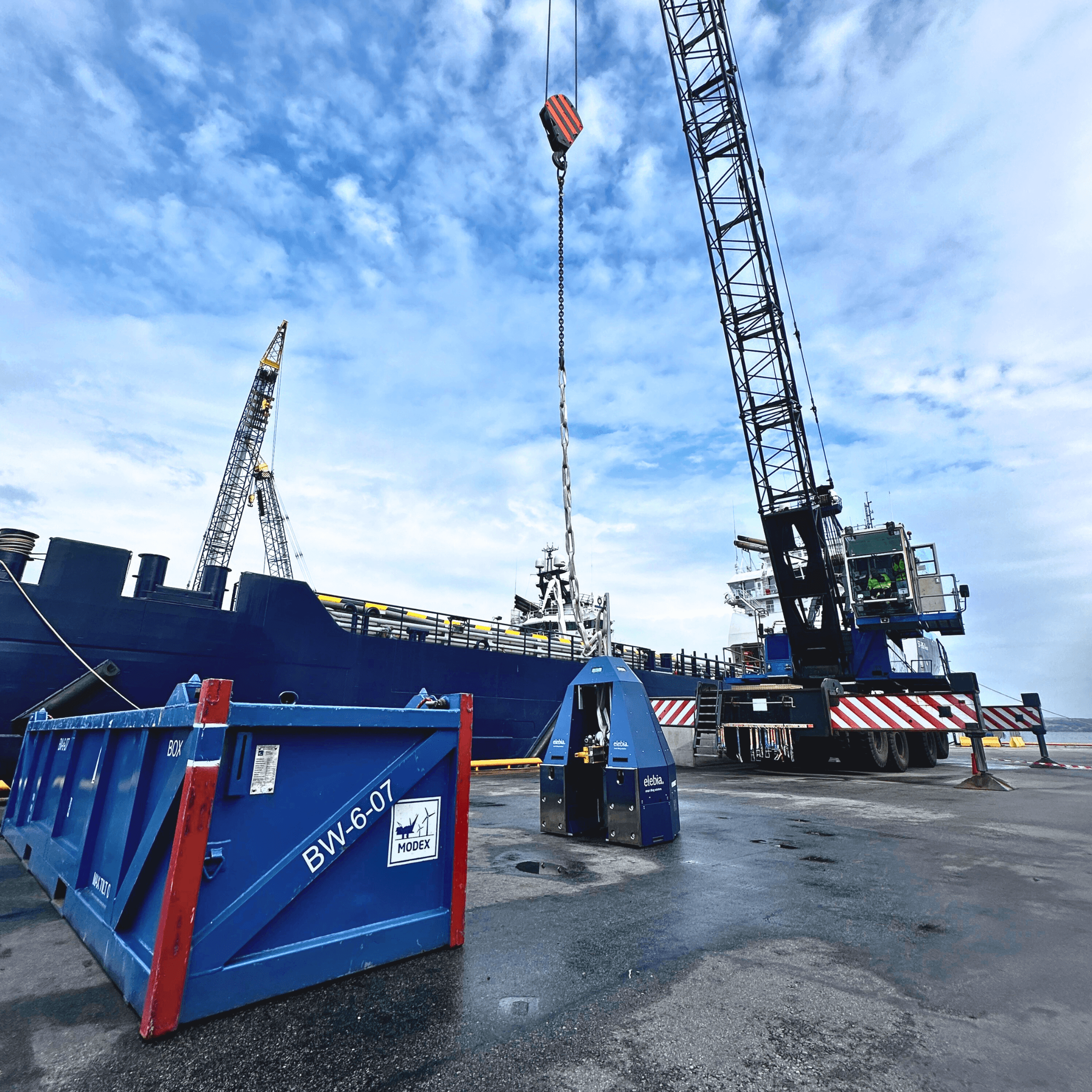




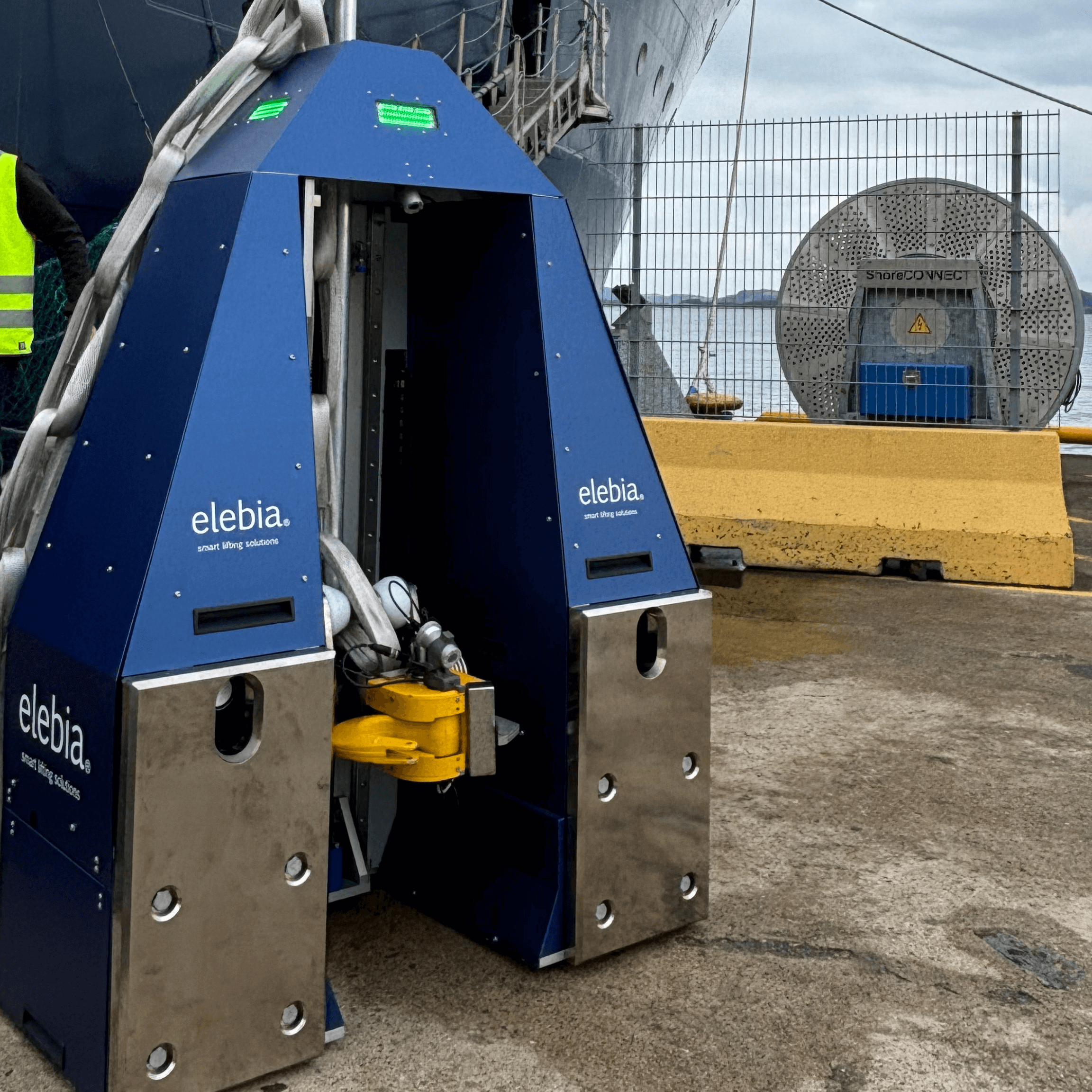
Probando el Hookbot p.1





Beneficios clave de Elebia Hookbot
La evolución de la elevación en alta mar: la historia de Hookbot
Preguntas frecuentes rápidas sobre nuestro Hookbot
¿Qué es el Hookbot y cómo beneficia las operaciones en alta mar?
El Hookbot es una solución de elevación automatizada de Elebia que agiliza las operaciones en alta mar al permitir el control remoto de los ganchos, lo que aumenta la seguridad y la eficiencia en entornos peligrosos. Este robot cuenta con movimiento omnidireccional, que permite el control y el movimiento desde una ubicación remota. Los operadores pueden gestionar los movimientos del robot y los mecanismos de enganche y desenganche del gancho de forma remota. El objetivo principal es eliminar la necesidad de humanos en cubierta durante las operaciones en alta mar, particularmente en condiciones climáticas adversas.
¿Se puede utilizar el Hookbot con diferentes tipos de contenedores?
Sí, el Hookbot es compatible con varios tipos de contenedores, diseñado para brindar versatilidad en diferentes escenarios de elevación.
¿Qué características de seguridad incluye el Hookbot?
Hookbot incluye características de seguridad como mecanismos de bloqueo a prueba de fallas, monitoreo remoto y alertas para garantizar una elevación segura y controlada.
¿Cómo se controla el Hookbot de forma remota?
El Hookbot se puede operar con un sistema de control remoto, que permite un manejo preciso desde una distancia segura.
¿Cuál es la capacidad de elevación del Hookbot?
La capacidad de elevación del Hookbot depende del modelo, pero el gancho evo20 con el que está equipado puede levantar hasta 20.000 kg. Para obtener más detalles, consulte las especificaciones de Elebia.
¿Cómo programo una demostración del Hookbot?
Puede programar una demostración comunicándose con Elebia a través del botón «Programar una demostración» en el encabezado o pie de página del sitio web, o enviando un correo electrónico a info@elebia.com.



